

Vous avez terminé de monter votre drone et vous vous demandez comment paramétrer votre drone FPV sur Betaflight ? Dans cet article, je vous montre tout ce qu’il faut pour bien paramétrer son drone fpv et toutes les petites astuces pour faire votre premier vol.
Sommaire
ToggleComment télécharger betablight sur son ordinateur pour paramétrer son drone fpv ?
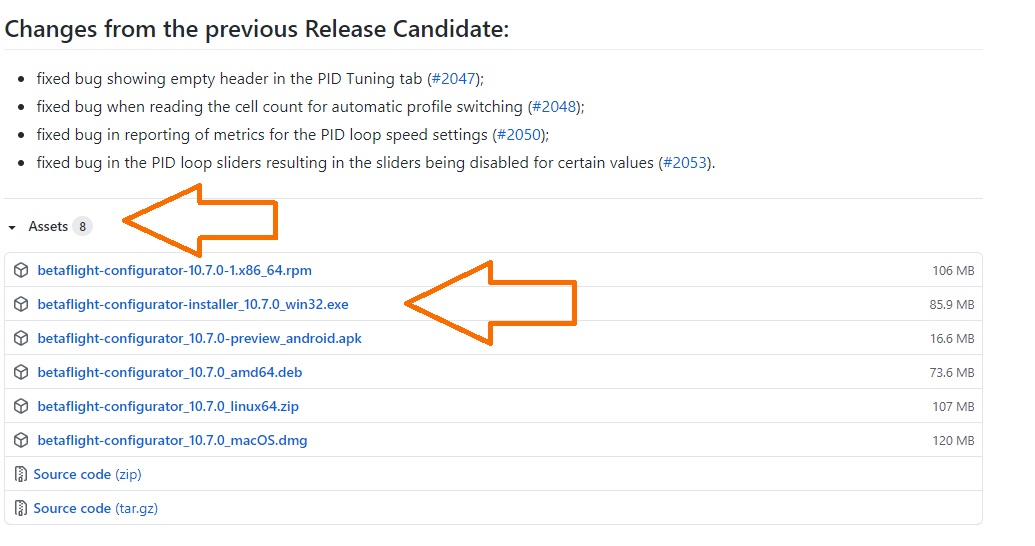
La première chose à faire, vous devez télécharger la bonne version de Betaflight selon le système d’exploitation de votre ordinateur :
- Windows
- Mac
- Linux
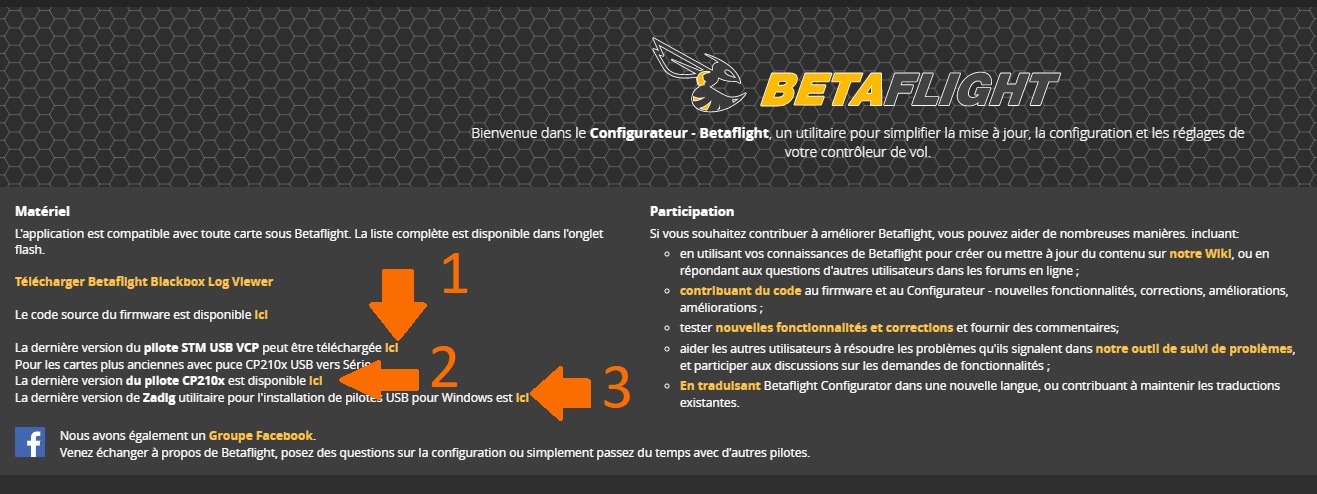
Par la suite, il vous faudra télécharger les pilotes Betaflight :
- Le pilote STM USB VCP
Pour les contrôleurs de vol les plus anciens avec une puce CP210x USB vers Série, vous pouvez télécharger ces pilotes :
- Le pilote CP210x
- Le pilote Zadig utilitaire pour l’installation de pilotes USB
Et le tour est joué ! Betaflight est prêt à être utilisé.
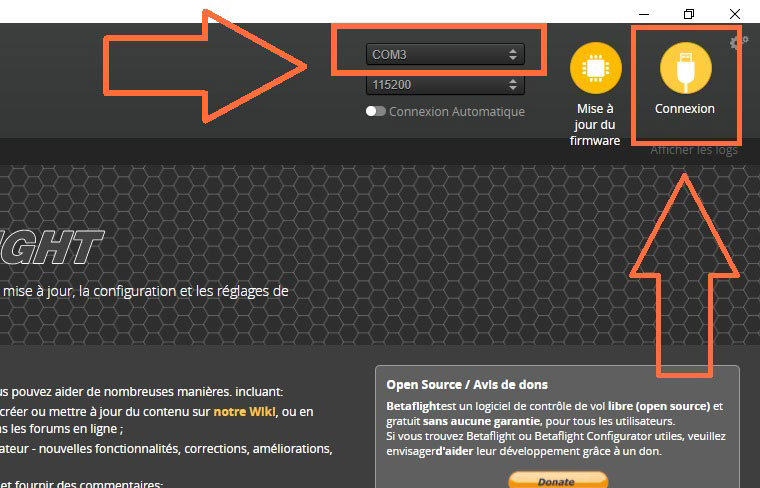
À posteriori, vous devez avoir un câble micro USB à connecter à votre FC (contrôleur de vol) et vérifier que vous êtes connecté à un port COM (exemple ci-dessous : COM3).
Sauvegarder la configuration d’origine lors du paramétrage du drone fpv
Avant de réaliser une manipulation sur votre drone fpv, vous devez sauvegarder les données d’origine de votre drone. En effet, si vous vous êtes amené à faire une mauvaise manipulation sur le paramétrage, il vous suffit de revenir sur cette version de base de votre configuration.
Pour cela, il vous faut aller dans l’onglet “CLI” et entrez la ligne de code : dump
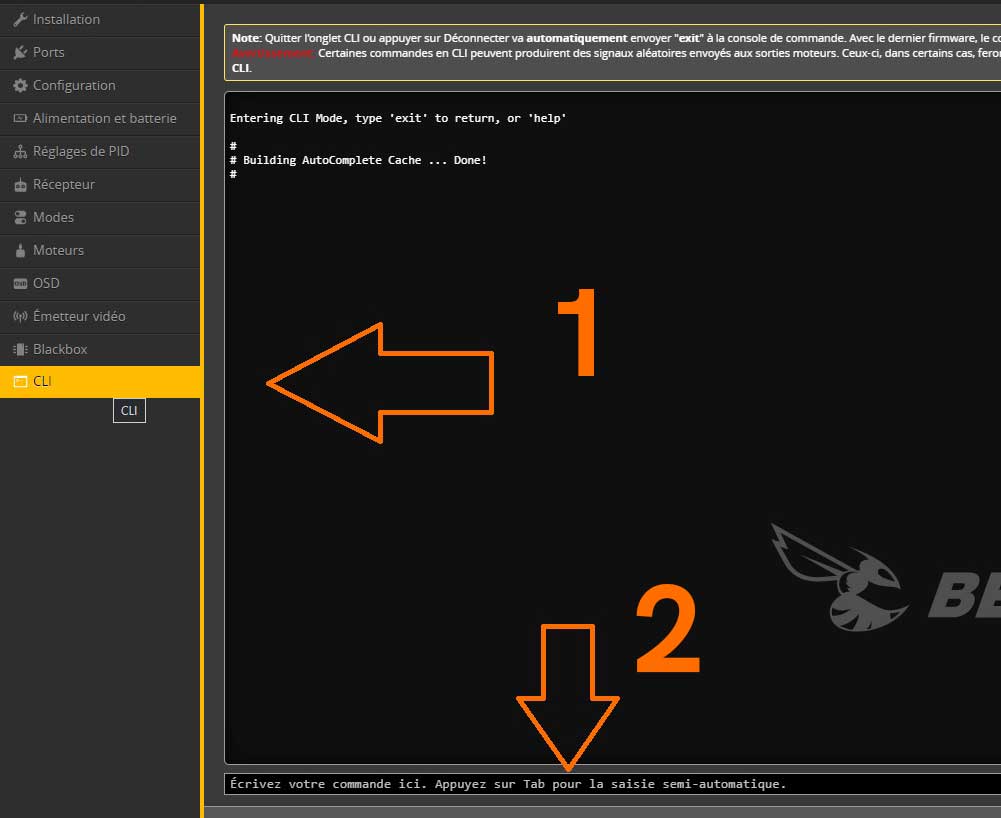
Par la suite, vous devez simplement enregistrer l’ensemble des données dans un bloc-notes et le garder bien au chaud.
Paramétrer son drone FPV sur beta flight: Flasher votre contrôleur de vol
Flasher votre FC sur beta flight consiste à mettre à jour celui-ci afin qu’il puisse avoir la dernière version logiciel du constructeur. Dans notre exemple, il s’agit d’une MATEK F405-CTR.
Pour réaliser la mise-à-jour, vous devez être en mode DFU (bootloader). Pour ce faire, allez dans le “CLI” et entrez le code : bl
Il est également possible de lancer ce mode en appuyant sur le bouton physique de la FC et de débrancher et rebrancher le câble micro USB.
Par la suite, cliquez sur “flasher un microprogramme” sur la barre de navigation à gauche de Betaflight.
- désactivez “Montrer les versions non finalisées” (on souhaite avoir les versions éprouvées)
- choisissez le modèle de votre carte (ce modèle est indiqué sur la fiche du constructeur avec la mention Betaflight INAV target).
sélectionnez la dernière version disponible de votre FC sur beta flight
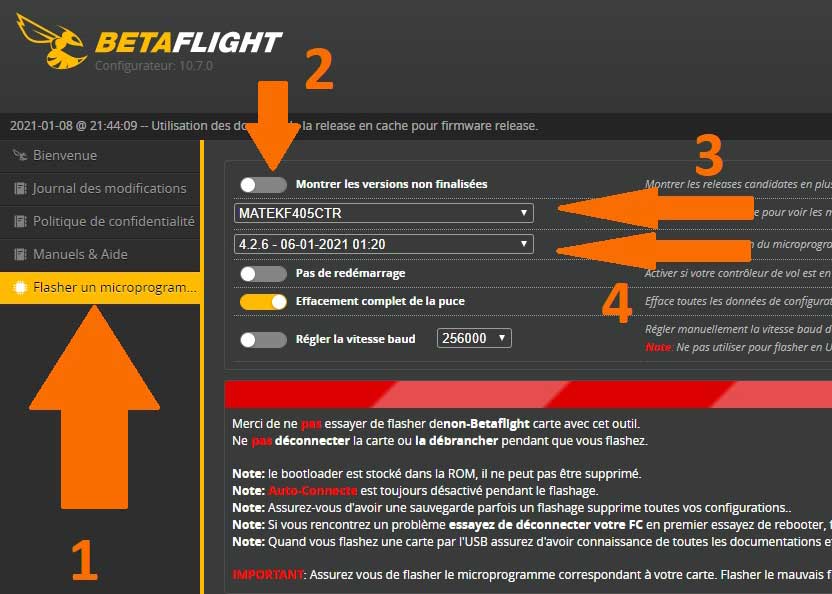
Ensuite, il reste à cliquer sur “Charger un microprogramme [En ligne]”, puis sur “Flasher le microprogramme”.

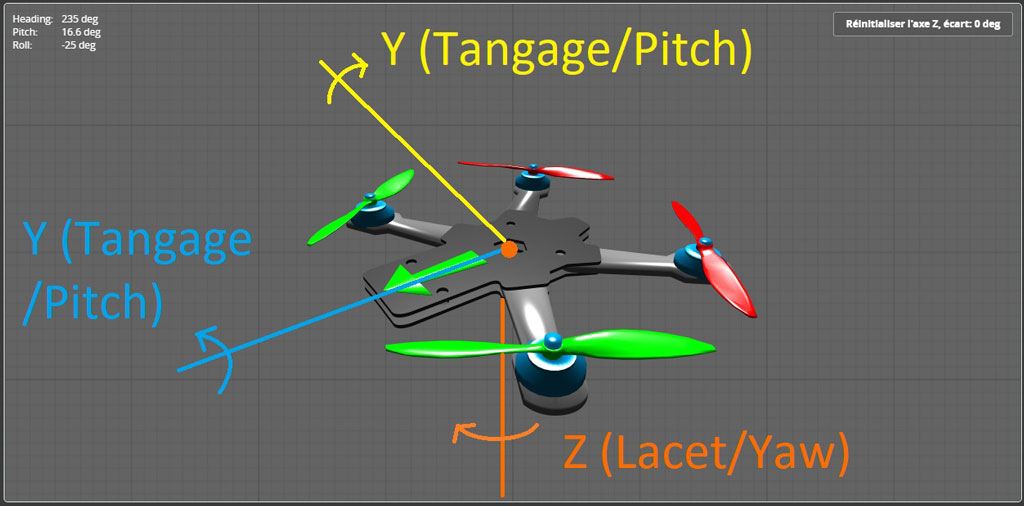
Il ne faut pas hésiter à calibrer votre accéléromètre dans l’onglet “Installation” et à vérifier si votre FC est dans le bon sens (vous penchez le drone en avant, le drone affiché sur l’onglet ”Installation” penche également en avant). Si ce n’est pas le cas, allez dans l’onglet “Configuration” et dirigez-vous dans :
- le champ “Sens de la carte et du capteur” : modifiez le “Degrés sur le Yaw” jusqu’à qu’il soit dans le bon sens (180° ou 90°).
Cliquez sur “Sauvegarder et Redémarrer”
Et voilà, le tour est joué !
Onglet Installation : calibrer l’accéléromètre et faire les sauvegardes
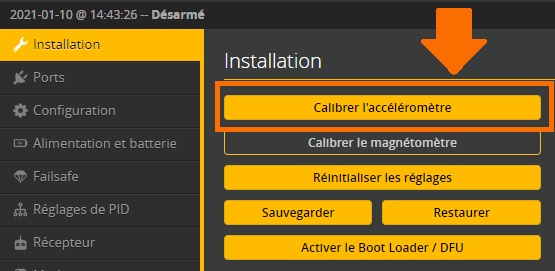
L’onglet “Installation” vous permet de réaliser le calibrage de l’accéléromètre de votre contrôleur de vol.
Un accéléromètre permet de mesurer l’accélération linéaire du drone sur 3 axes (X/Y/Z). De ce fait, vous pourrez savoir si votre drone se déplace sur un de ces trois axes.
Pour calibrer votre accéléromètre, vous devez positionner votre châssis à plat, et cliquer sur le bouton “calibrer”. Assurez-vous qu’il soit bien-sûr une surface plane et que rien ne bouge pendant le calibrage. Cela devrait prendre quelques secondes.
Onglet ports : assigner numériquement vos composants à des UART
À cette étape, plusieurs possibilités s’offrent à vous sur beta flight :
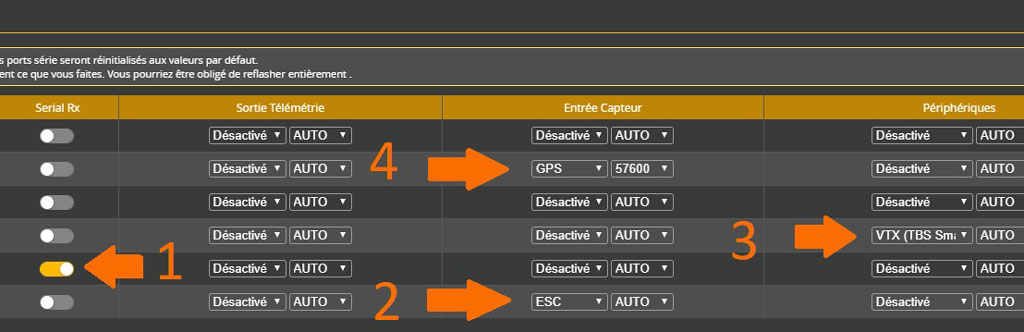
- assigner un récepteur (Rx) à un UART : dans la colonne “Serial Rx”, cochez le petit bouton (il doit devenir jaune). Si votre récepteur est sur l’UART 4 (Tx 4 et Rx 4 sur votre FC), vous devez aller sur la ligne de l’UART 4 (sur Betablight)
- déclarer un ESC 4 en 1 à un UART (les esc individuels n’ont pas besoin d’être assignés) : dans la colonne “Entrée Capteur”, choisissez ESC
- assigner un VTX à un UART
- déclarer un GPS à un UART (si vous en possédez un) : toujours dans la colonne “Entrée Capteur”, choisissez GPS
Pour rappel, un UART représente un port Tx et Rx (Tx 1 et Rx 1 = UART 1).
Cliquez sur “Sauvegarder et Redémarrer”.
Onglet configuration : les paramètres généraux du drone FPV
Dans cette partie de Betaflight, vous pourrez configurer une majeure partie de votre multirotor (ESC etc…). Pour cela, vous avez une multitude de champs à compléter :
Champ “Configuration système” :
- “Fréquence de rafraîchissement du Gyro” : cette valeur est bloquée, nul besoin de s’en occuper
- “Fréquence de la boucle PID” : laissez la valeur d’origine
- Désactiver ou activer le “baromètre” si votre FC en est équipé
- Désactiver “magnétomètre”
Champ “Personnalisation” :
- “Nom du modèle” :donnez le nom que vous souhaitez
Champ “Récepteur” :
- “Mode du récepteur” : sélectionnez “RX série (SPEKSAT, SBUS, SUMD)”, pour la simple raison que vous avez coché “Seriel Rx” (Rx série) dans l’onglet “Ports”
- “Type de récepteur série” : indiquez le protocole utilisé par votre récepteur, en général, pour du FrSky, il s’agit du “SBUS” et “CRSF” pour les récepteurs de la marque TBS
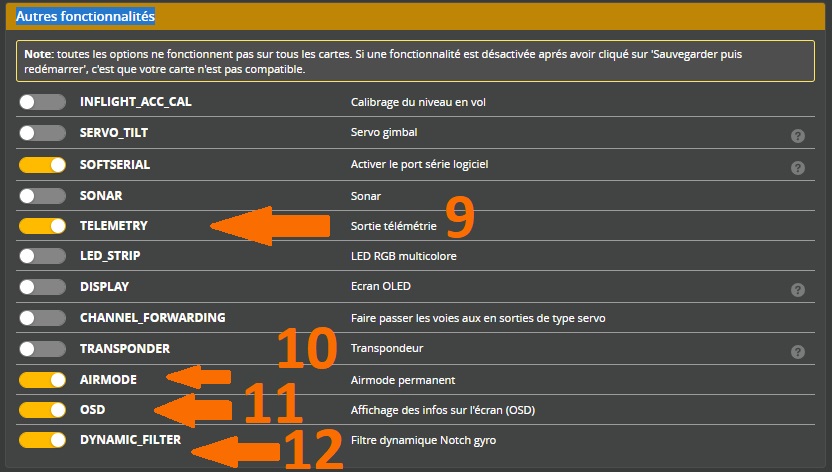
Champ “Autres fonctionnalités”
- TELEMETRY : activez la télémétrie vous permettra de récupérer les informations des capteurs de votre Flight Controller sur la radiocommande
- AIRMODE : l’airmode doit être activé puisqu’elle permet à votre drone de garder la même trajectoire lorsque vous lâchez les commandes. Vous évitez ainsi qu’il fasse des 360 lorsque vous lâchez les commandes.
- OSD : cette fonctionnalité doit être activée pour avoir les informations dans vos lunettes ou votre masque FPV
- DYNAMIC_FILTER : il doit être activée
Champ “Fonctionnalités ESC/Moteur” :
- “Protocole ESC/moteur” : il s’agit du langage utilisé pour communiquer de l’ESC à la FC. Je vous invite à aller voir la fiche produit des ESC. Les protocoles OneShot et MultiShot sont plus anciens par rapport au protocole Dshot. Si vous avez du Dshot, je vous invite à choisir le Dshot300 ou Dshot600. Si vous choisissez plus haut, vous risquez de « cramer » vos ESC. Dans la situation où vos ESC ne possèdent pas ce protocole, rabattez-vous sur du OneShot125 voire Multishot.
Vérifiez bien protocole utilisé par vos ESC.
Champ “Armé” :
- “Angle maximum pour armer“ : cette valeur doit être de “180°”, cela vous permettra de faire décoller votre drone dans la situation où il serait bloqué sur une branche à 90 degrés par rapport au sol.

Onglet Alimentation et batterie : les paramètres de la batterie
Betaflight peut signaler au pilote l’état actuel de la LiPo, et lui indiquer s’il peut ou non continuer à voler. Pour cela, allez dans l’onglet “Alimentation et batterie“ et paramétrez:
Le champ “Batterie” :
- “Tension Mini par élément” : 3,75 Volt par cellule, une fois que vous avez atteint ce niveau de batterie, vous devez aller vous poser afin de préserver votre batterie
- “Tension Maxi par élément” : 4,2 Volt par cellule
- “Tension d’avertissement par élément” : 3,70 Volt par cellule. Descendre en dessous de cette valeur peut abîmer de manière irréversible votre LiPo !

N’oubliez pas de “Sauvegarder”.
Onglet Réglage de PID : modifier le comportement de votre drone en vol
Pour réaliser vos premiers vols, vous n’avez pas obligatoirement besoin de configurer cette partie.
Cette partie fera l’objet d’un article plus complet pour vous montrer comment régler vos PID.
Onglet Récepteur : le paramétrage de la radiocommande
Vous aurez besoin de connecter une LiPo à votre drone, afin d’alimenter votre récepteur. Ne laissez pas la batterie trop longtemps connectée au drone. En effet, cela permet d’éviter les surchauffes inutiles.
Ne branchez jamais une Lipo sans avoir mis une antenne à votre VTX et à votre récepteur. Cela représente un grand risque de brûler vos composants !
Dirigez-vous ensuite dans l’onglet “Récepteur”. Vérifiez que toutes les voies fonctionnent et qu’elles correspondent bien lorsque vous contrôlez les manettes de votre radio (Roll [A], Pitch [E], Yaw [R], Throttle [T], AUX 1, AUX 2 ….). Si ce n’est pas le cas, vous pouvez suivre la procédure suivante :
champ “Ordre des voies” et entrez TAER1234 ou AERT1234 (si cela ne fonctionne pas, essayez d’inverser les lettres).

Champ “Manche bas” : la valeur peut être miss à 1030 environ
Champ “Manche en haut” : cette valeur doit monter à 2000
Appuyer sur “Enregistrer”.
Onglet Modes :
L’onglet “Modes” est destiné à désigner les “switch” de la radiocommande afin qu’il puisse faire des actions spécifiques (ex : pour activer un buzzer, armer vos moteurs etc…).

Je vous conseille d’activer les modes suivants :
- PREARM : le prearm constitue une sécurité de plus pour armer (activer) les moteurs. Dans la situation où vous armer malencontreusement votre drone dans les mains. Cela peut vous sauver des blessures inutiles.
- ARM : armer votre drone consiste à activer les moteurs du drone
- HORIZON : pour les débutants, ce mode permet de stabiliser le drone en cas de besoin
- BEEPER : faire sonner le buzzer (si vous en possédez un)
- GPS RESCUE : activer le gps (si vous en possédez un)
Pour cela, vous devez choisir un “AUX” et faire glisser le sélecteur de plage le plus à droite ou le plus à gauche.
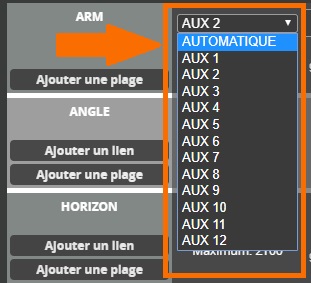

Répéter la procédure pour chaque switch/AUX.
Cliquez sur “Enregistrer”.
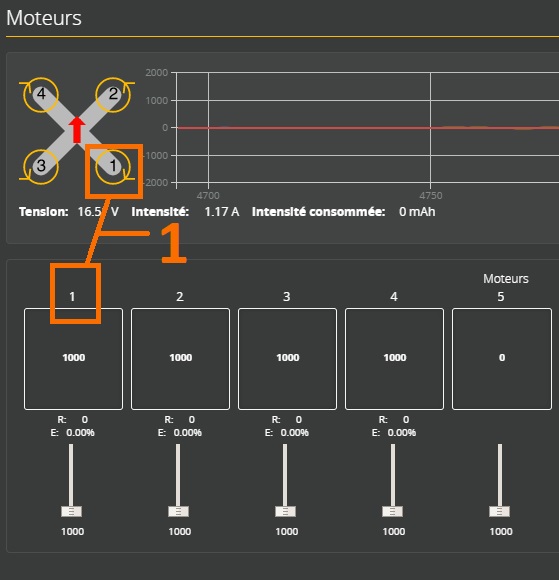
Onglet Moteurs : tester vos moteurs
Maintenant, vous devez aller voir dans l’onglet “Moteurs”.
Veillez à retirer vos hélices de votre drone.
Cochez le bouton “Je comprends les risques”
Par la suite, vous devez tester vos moteurs un par un et vous assurez que la valeur E reste à 0%. En effet, vous devez utiliser le curseur blanc pour faire tourner le moteur et voir s’il y a une erreur. Monter cette valeur légèrement (à 1050 ou 1100), cela ne sert à rien de monter trop haut hormis surchauffer vos composants.
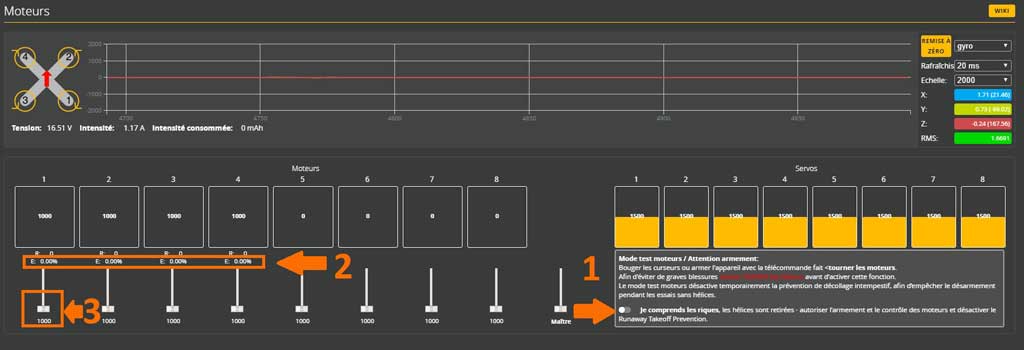
C’est également l’occasion de vérifier si le bon moteur tourne. Par exemple, si vous faites tourner le moteur 1, c’est bien le moteur 1 qui tourne et ainsi de suite…
Onglet OSD : configurer les informations essentielles au pilotage
L’onglet « OSD » est l’une des parties les plus importantes pour voler avec votre drone. En effet, l’onglet OSD permet d’afficher des informations clés dans vos lunettes / votre masque fpv (niveau de la batterie etc…).
À minima vous devez activer les informations suivantes :
- “Avertissements” : l’info avertissement indique les raisons de ne pas armer votre drone (signal gps absent etc…)
- “Direction point de décollage” : il s’agit d’une petite flèche qui vous indique d’où est-ce que vous venez.
- “Distance du point de décollage” : la distance entre vous et le drone.
- “Latitude GPS” + “Longitude GPS” : ces coordonnées GPS seront très utiles pour retrouver votre drone. Il vous suffit de rentrer les coordonnées dans un GPS (ex : google maps) et de suivre le chemin pour retrouver votre drone (si vous possédez un GPS).
- “mAh de la batterie consommé” : cela indique la quantité de mah (milliampère-heure) consommé.
- “Tension moyenne d’une cellule” : vous ne devez pas descendre en dessous de 3,7 Volt par cellule pour préserver la batterie.

Ensuite, il reste à déplacer les données sur le petit écran d’exemple.

Il ne faut pas oublier de sauvegarder.
Onglet Émetteur vidéo : paramétrer votre transmetteur vidéo Smartaudio (VTX)
Dernière chose à faire qui n’est pas des moindre, c’est charger les préréglages dans votre émetteur vidéo (VTX).
La procédure que je vais vous décrire correspond à un VTX de la marque RUSH TANK avec le protocole Smartaudio.
Les données de configuration de la table VTX est disponible sur Github :
Pour voir les bonnes données dans votre VTX, vous devez avoir la clé de débogage Smartaudio (Smart Audio Debug[0] key).

Pour la trouver, c’est très simple, suivez ces étapes :
- onglet “Blackbox”
- dans le champ “Configuration de la Blackbox”, choisissez “SMARTAUDIO” dans “Mode débug de la Blackbox”
- cliquez sur “Sauvegarder et redémarrer”
- activez le “Mode Expert”
- onglet “Capteurs”
- champ “Debug”
- champ “X”


Dans notre exemple, nous avons une clé de débogage Smartaudio X: 216.
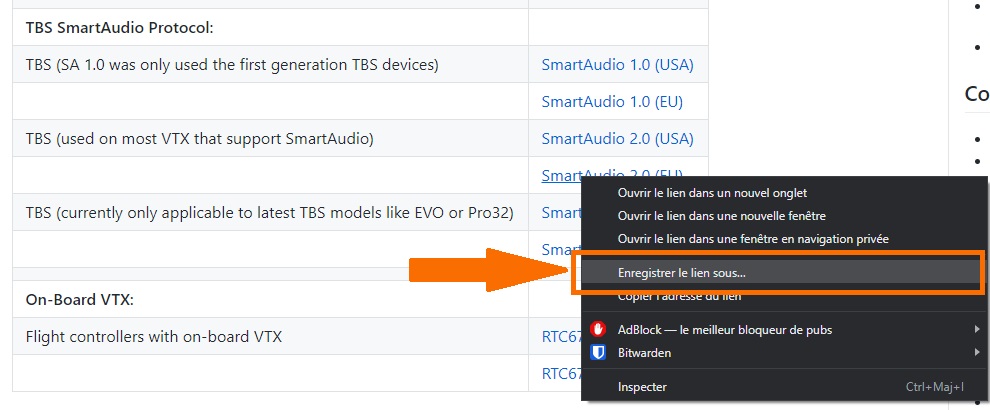
En suivant la procédure, la table VTX est la suivante : TBS (used on most VTX that support SmartAudio) – SA 2.0 unlocked


Maintenant, vous avez 2 choix qui s’offrent à vous : SmartAudio 2.0 (USA) ou SmartAudio 2.0 (EU). La différence entre les deux est que la version Europe (EU) aura des fréquences indisponibles en raison de la réglementation européenne.
La version que nous allons privilégier aujourd’hui, est la version Europe (Libre à vous de choisir la version USA).
Il suffit d’enregistrer sous le lien (clique droit) et de l’intégrer à betaflight comme suit :
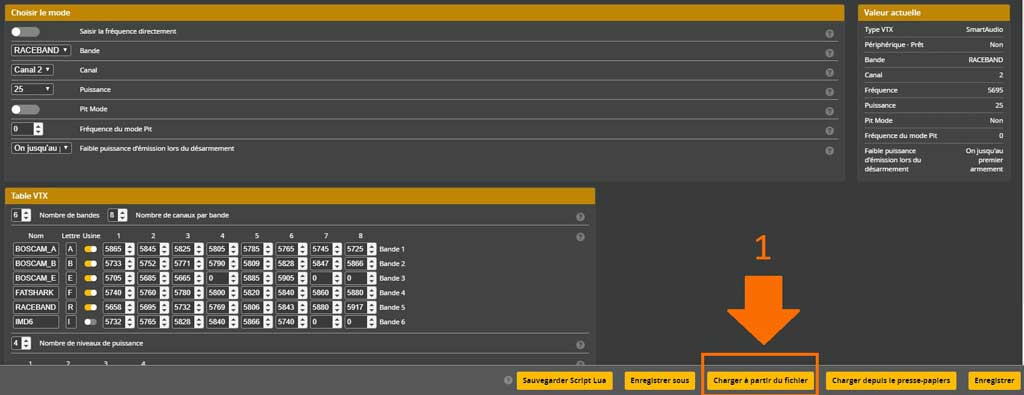
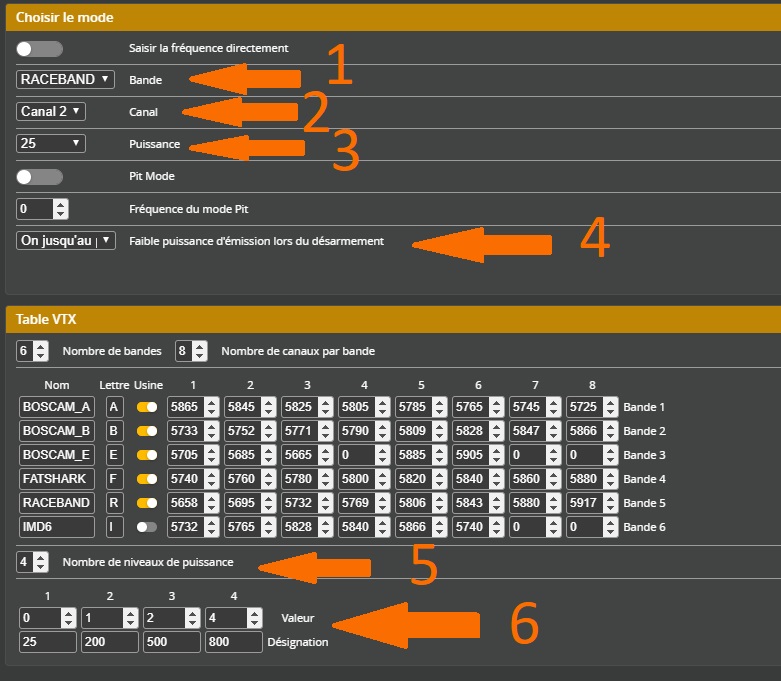
Champ “Choisir le mode” :
- Bande : choisissez “RACEBAND” car il s’agit de la bande la plus espacé en termes de fréquence
- Canal : sélectionnez le canal de votre choix. Lorsque que vous voudrez connecter votre masque, veillez à reprendre le même canal (canal 2 dans betaflight, canal 2 dans votre masque)
- Puissance : je vous conseille de le mettre à 25 puis de le changer manuel sur la zone de vol (avec le bouton physique du VTX)
Champ “Table VTX”
- Ajouter le “Nombre de niveaux de puissance” : si vous avez 4 niveau de puissance (25/200/500/800 mW), vous devez mettre 4
- Insérer les valeurs du niveau de puissance du VTX : ajoutez simplement les données du transmetteur vidéo 25 mw …
Bravo, vous avez configuré votre drone FPV pour réaliser votre premier vol.
Conclusion pour paramétrer son drone FPV
Pour vous résumer, Betaflight vous permet de configurer entièrement votre drone FPV.
Avant de réaliser toute action, il est important de sauvegarder votre configuration d’origine (Backup) afin de revenir en arrière dans la situation où vous auriez fait une mauvaise manipulation. De plus vous devez flasher, c’est-à-dire mettre à jour votre contrôleur de vol (FC).
Ainsi, vous devez paramétrer différents onglets dans Betaflight :
- Installation pour l’accéléromètre
- Ports pour déclarer vos composants aux UART’s
- Configuration pour paramétrer l’ensemble des caractéristiques du drone
- Alimentation et batterie pour la LiPo
- Récepteur pour pouvoir bien contrôler votre drone avec votre radiocommande
- Moteurs pour essayer vos moteurs
- OSD pour afficher des informations importante dans votre masque
- Émetteur vidéo pour configurer votre transmetteur vidéo (VTX)
Vous êtes dès maintenant prêt pour faire vos premiers vols.
- Jean-Baptiste
- janvier 6, 2024
- 16 commentaires

Salut.
Enfin un tuto betaflight clair net et avec ce qu’il faut !
Merci beaucoup 😊
Hello,
Merci pour ton commentaire et ton avis sur cet article. 😊
Jean-Baptiste
Bonsoir,
Est-il possible de se servir de Betaflight pour programmer un drone racer (tyro109) de façon à ce que les réactions de l’appareil soient moins violentes ?
De façon à m’habituer progressivement aux premiers vol.
Bonjour,
Merci pour ton commentaire. 😊
Oui, tu pourra monter progressivement lorsque tu sera plus à l’aise.
Jean-Baptiste
Bonjour Jean baptiste, un grand merci pour ce gros travail très professionnel et bien construit. Je suis débutant sur le sujet. Je garde précieusement ce lien qui va éclaircir toutes mes interrogations j en suis sûr. Bernard
Bonjour Bernard,
Merci pour votre commentaire et votre soutien. 😊
Jean-Baptiste
Bonjour Jean Batiste,
Merci beaucoup pour ton travail, j’attend avec impatience votre article sur les PID.
Bonnes fêtes
Bonjour,
Merci pour votre soutien 🙂
Jean-Baptiste
Bonjour,
Un grand merci pour ce tuto extrêmement clair et précis.
Bonjour Larouf,
Merci pour votre soutien 🙂
Jean-Baptiste
Bonjour Jean Baptiste je voulais vous remercier et féliciter pour ce tuto très précis et très bien expliqué avec des belles photos qui vont beaucoup m’aider pour le début de cette passion très compliqué…
Bonjour,
Merci pour votre retour positif !
Au plaisir de répondre à vos questions 🙂
Jean-Baptiste
Hello merci beaucoup pour ces explications simples et claires ! Ludo.
Bonjour Ludo,
Ravi de vous avoir aidé 🙂
Au plaisir de vous revoir sur le site.
Jean-Baptiste
Bonjour,
Merci pour votre travail qui doit prendre pas mal de votre temps.
Très propre, très clair c’est très plaisant à parcourir et à lire
J’y ai appris beaucoup de chose. J’ai hâte de vous lire sur les PID si c’est toujours d’actualité 😊
A bientôt.
Max64.
Bonjour Max64,
Merci pour votre commentaire !
C’est un plaisir d’entendre ça ! L’article sur les PID est dans mes projets 🙂
N’hésitez pas à me poser des questions.
Jean-Baptiste